QD 石材和木制品雕刻系统中使用的机械手是 KUKA 产品:全新 QUANTEC 系列。
本应用中使用的机器人模型是“非标准”的,特别是KUKA提供的机器人,有两个特殊选项:“Cast”和“Absolute Precision”。 铸造选项是该机械手的一个显着特征。 机械手的最后三个连杆涂有特殊的超压涂层。 因此,该选项使机械手比标准标准更能抵抗外部腐蚀剂和灰尘。 或液体防护,防护等级可达IP 67。建议用于石材铣削应用此选项。 绝对精度选项具有对机器人运动学参数进行软件校准的功能,这些参数源自整个工作台上不同位置的精确测量。 该选项使机器人在操作稳定性方面具有更高的精度和更好的“质量”。
运动结构的设计使得工件可以在旋转工作台上移动。 旋转台由7°机械轴控制,可用于定位模式和调整模式。 工作台运动模式的管理由后处理器/ROBOmove 模拟器执行。
【与数控机床相比,切割机器人主要有以下优点:】
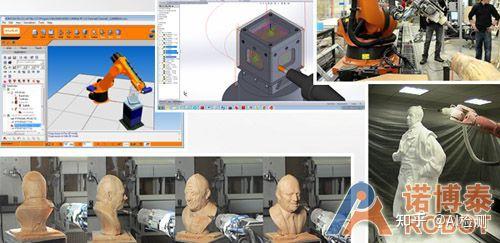
【机器人雕刻系统组成】
机器人雕刻系统由工业机器人、电主轴、刀架、机器人行走导轨、控制柜等组成,通过自动化系统集成,使机器人成为多轴加工单元。 该系统除了具有五轴加工中心的部分功能外,还可以适应多种异形材料和非标零件的三维铣削。 适用于各种软金属和软材料,如铝、塑料、木材、玻璃工业、碳纤维、复合材料等大型复杂工件的高速铣削、钻孔和雕刻。
电动铣削主轴安装在机器人的手腕部分(第6轴法兰),通过快速换刀可以自动快速换刀。 机器人的运动由计算机系统控制,通过与切削编程软件的互操作链接,铣削软件可以直接从CAD/CAM程序中读取G代码,使机器人具有与数控机床相同的工作性能。多轴加工中心,从而实现虚拟制造。 。
机器人力控制软件包括安装在机器人肘关节中的力和扭矩传感器。 它使机器人切割单元能够根据工件表面的不一致和不完整情况感知并自动调整所施加的扭矩和力,以提高工作效率。 避免损坏工具和工件。
库卡 KR 150 R3100 PRIME(QUANTEC PRIME)
更加流线型和轻量化,同时具有极高的刚度和精度。 轨迹精度高,效率高,因此循环时间更短。 QUANTEC prime 为点焊等提供了新的性能水平。 尽管 KR 150 R3100 prime 的长度为 3100 毫米,有效负载为 150 公斤,但其可重复位置精度为正负 0.06 毫米。
(适合15KW集成)(适用于15KW集成电路)
有效负载(公斤)150
有效负载(公斤)150
最大伸展距离(MM)3100
最大距离(MM)3100
轴数6
轴数 6
重复性(MM)0.06
重复位姿精度(MM)0.06
控制器RKRC4
控制器KRC4
防护等级IP67
防护等级IP67
铣床设备包
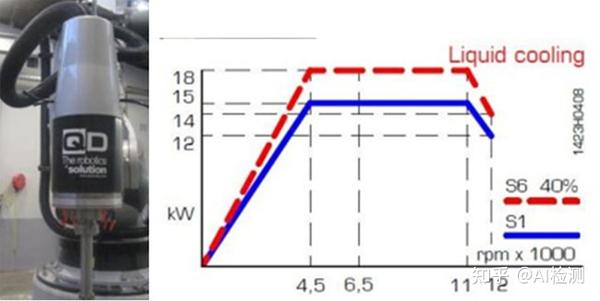
15KW 1200 rpm 32NM,ISO40(参考 S.2)
该设备为15KW(S6循环为18KW)电镀主轴,配备独立闭环冷却液和ISO40标准自动换刀装置。 它适用于直径 400 毫米的切割片和延伸长度达 350 毫米的工具。
功率(千瓦)15
功率(千瓦)15
最大转速(转) 12000
最高转速(转/分)12000
最大扭矩(NM,RPM) 32,4500
最大扭矩 (NM, RPM) 32, 4500
冷却液
冷却液
ISO40 型刀柄
ISO40 型刀柄
频率(HZ)600
频率(赫兹)600
刀具路径生成——铣削刀具路径可以通过CAD CAM技术生成
从 CAD 模型到机铣零件
机器人程序生成
ROBOmoveTM软件应用程序可以离线处理3/5轴CAD-CAM系统输出(APT或ISO)并将其转换为工业拟人机器人编程语言。
ROBOmoveTM 允许管理由拟人机器人(6 DOF)的运动学配置和外轴运动策略(轨道运动和/或转台)产生的 DOF 冗余。
冗余管理工具允许在执行刀具路径时离线编程和检查机器人的 TCP 扭矩。 对于外轴,在程序运行时写入机械手与外轴之间的初始位置和相对位置是可行的。 运动策略:定位或机器人插补运动。
ROBOmoveTM 包括工作循环、操作机器人工作区域和碰撞检查的真实 3D 动态场景插图。图形模拟场景包括:机器人、主轴、工具、工件和最终设备或工作空间中的任何重要组件
通过用户设置的库管理工具。 使用不同的方法突出显示刀具路径并展示进给和机器人可访问位置方面的速度。
考虑到工作区域,可以轻松完成工件定位。
除了可以轻松离线编程外,ROBOmoveTM这种拟人化的工业机器还可以在安全的环境中不间断地培训操作员。
操作系统Operating system
Windows XP、Windows 98、Windows ME
Windows NT 4.0、Windows 2000、Windows XP
硬件性能
处理器:Pentium IV 或以上
CPU 奔腾 IV 或以上
内存:1024 MB
内存 1024MB
高清:500 MB 免费
硬盘 500MB 可用空间
显卡:3D OpenGL加速器
显卡:3D OpenGL加速器
支持CAD CAM系统
任何 APT 或 ISO 标准代码输出
格式化系统
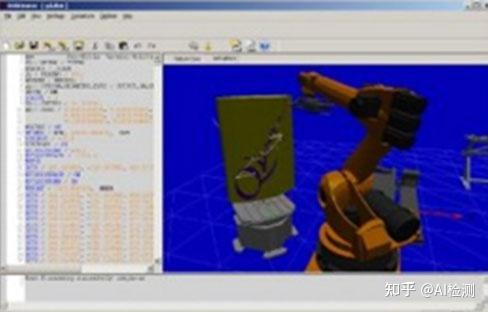
ROBOmove:右侧是模拟窗口 ROBOmove:左侧是输入代码(APT 或 ISO,右侧是输出代码)
硬件配置
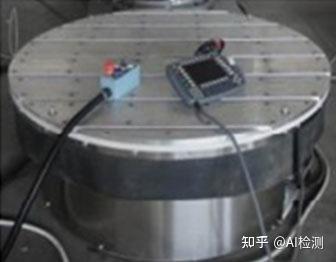
旋转台
转台设计重量负载范围为500Kg至60,000Kg,最高转速可达10rpm,并配备SUMITOMO CYCLO或类似的先进零齿隙减速齿轮箱。 轴承可承受 250 吨的重量。
转台结构为焊接钢架,表面有一层铝合金。 使用的电机是KUKA轴,由7°机器人轴控制。
固定工作台
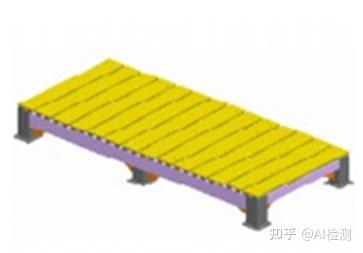
固定工作台为坚固焊接框架,表面镀锌铁,工作台尺寸为2000*1400[mm]。 或 3250*1400 [毫米]。
刀架底盘

由焊接钢架制成的刀架外壳可容纳不同的铣刀。 该装置配有可打开/关闭的钢盖,以保护刀架免受灰尘影响。 底盘的设计允许设备自动换刀。 根据刀架的类型,可以使用齿条位置 10、15 和 30。 支持锥形HSKF63、ISO40、ISO 50
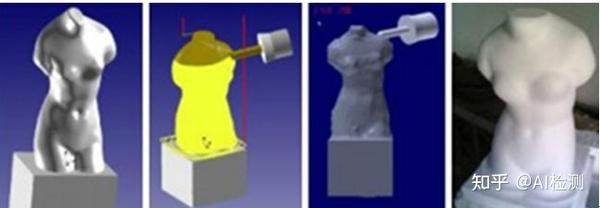
专业扫描仪系统-双焦设备(适合扫描超过50*50*50mm物体)

视场150MM
350MM
可视角度150MM
350MM
精度±0.05MM
精度±0.05MM
分辨率2*13
像素
分辨率2*13
百万像素
照明LED
发光二极管
测量
时间
测量时间小于3秒
文件.STL、.OBJ、
文件扩展名
格式SEC
格式 启动图形交换规范
工具包

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏